MA1106/Lectures
From FUKTwiki
Student-made lectures notes in Linear Algebra (MA1106), in Swedish. Accuracy is not guaranteed!
Contents
|
[edit] Första föreläsningen
[edit] Linjär Algebra
- Matrisberäkning
- Skärningspunkter
- Rumvridning
En linjär ekvation består av ax + by + cz + d = 0 och kan även skrivas som a1x1 + a2x2 + a3x3 + d = 0.
Liknade ekvation som:
[edit] Gausseliminering
![\begin{cases}
x_1 + 2x_2 + x_3 = 1 & \cdot [-3] \\
2x_1 + 3x_2 - 2x_3 = 1 \\
3x_1 + 4x_2 - 4x_3 = 1
\end{cases}
\to
\begin{align}
-3x_1 - 6x_2 - 3x_3 = -3 \\
\underline{3x_1 + 4x_2 - 4x_3 = 1} \\
-2x_2 - 7x_3 = -2
\end{align}](upload/images/math/a/2/d/a2d1c974d79bd5c00f7ea9e04c33b69c.png)

![\begin{cases}
x_1 + 2x_2 + x_3 = 1 & [\cdot (-2)] \\
2x_1 + 3x_2 - 2x_3 = 1 \\
-2x_2 - 7x_3 = -2
\end{cases}
\to
\begin{align}
-2x_1 - 4x_2 - 2x_3 = -2 \\
\underline{2x_1 + 3x_2 -2x_3 = 1} \\
-x_2 -4x_3 = -1
\end{align}](upload/images/math/c/1/4/c14071e7f2f22b8bc17e89f629c9eca6.png)
![\begin{cases}
x_1 +2x_2 +x_3 = 1 \\
-x_2 -4x_3 = -1 & \cdot [-2] \\
-2x_2 -7x_3 = -2
\end{cases}
\to
\begin{align}
2x_2 + 8x_3 = 2 \\
\underline{-2x_2 - 7x_3 = -2} \\
x_3 = 0
\end{align}](upload/images/math/e/0/c/e0cf601e05b9de88164de02f05825895.png)

Linjära ekvationer kan ha tre typer av lösningar:
- Oändliga
- entydiga
- saknad (inga)
[edit] Vanligt förekommande tentaliknande uppgift
EX: För alla värden av A och B, vilka har en entydig, oändlig eller saknad lösning?
Svar:
![\begin{cases}
x_1 + 2x_2 = b & \cdot [-4]\\
4x_1 + ax_2 = 5
\end{cases}
\to
\begin{align}
-4x_1 - 8_x2 = -4b \\
\underline{4x_1 + ax_2 = 5} \\
-8x_2 + ax_2 = 5 - 4b
\end{align}](upload/images/math/a/5/9/a59154289236ffef2fecfc075a1d6f9f.png)
Detta kan skrivas som (a − 8)x2 = 5 − 4b och då är det möjligt att se vilka lösningar som a och b ger:
 |
Oändligt antal lösningar |
 |
entydiga lösning |
 |
saknar lösning |
[edit] 2007-09-07
[edit] Allmänt
Skalär - Ett värde utan dimension (vanligt tal i motsatts till vektorer)  - Riktad sträcka
- Riktad sträcka
En riktad sträcka bestäms av:
- Riktning
- Storlek
- Startpunkt
En Vektor saknar startpunkt, och betecknas  .
.
 betyder att och
betyder att och  är parallella.
är parallella.
[edit] Vektormultiplikation
För  så måste
så måste  och
och  vara parallell med .
vara parallell med .
För den resulterade produktvektorn gäller:
- Längden är
 .
. - Riktningen förblir samma som om λ > 0.
- Riktningen får motsatt riktning från om λ < 0.
[edit] Subtraktion mellan vektorer

 är parallell med
är parallell med 
[edit] Baser i planet, rummet och i en linje
I ett rum, plan eller linje måste alla baser vara ickeparallella med varandra.
Antal baser:
- linjer = ska ha 1 basvektor.

- plan = ska ha 2 basvektorer.

- rum = ska ha 3 basvektorer.

Vektorer som är linjärt beroende med varandra kan ej utgöra mer än en bas.

P:(X1,X2,X3) är en punkt i rummet.
[edit] Linjärt beroende eller oberoende
Def: Ett antal vektorer kallas linjärt beroende om det finns reella tal som inte alla är lika med noll, så att:  , Annars så är vektorena linjärt oberoende. Om kan beskrivas med hjälp av vektorena och/eller
, Annars så är vektorena linjärt oberoende. Om kan beskrivas med hjälp av vektorena och/eller  så kan man kalla en linjärkombination av och/eller .
så kan man kalla en linjärkombination av och/eller .
Om man ställer upp vektorena i ett ekvationssystem, så gäller det att enbart om det finns en entydig lösning och den entydiga lösningen är λ1,λ2,λ3 = 0 så kan man kalla att vektorena är linjärt oberoende.
Om λ1 = λ2 = λ3 = 0 så kan man säga att vektorena är linjärt oberoende.
[edit] Example
a)λ1(4,1, − 5) + λ2(2,1, − 1) + λ3(1,1,1) = 0
![\begin{cases}
4 \lambda_1 + 2 \lambda_2 + \lambda_3 = 0 \\
\lambda_1 + \lambda_2 + \lambda_3 = 0 & \to [\cdot(5)] \to \\
-5 \lambda_1 + -\lambda_2 + \lambda_3 = 0
\end{cases}
\begin{cases}
5 \lambda_1 + 5 \lambda_2 + 5 \lambda_3 = 0 \\
\underline{-5 \lambda_1 + -\lambda_2 + \lambda_3 = 0} \\
4 \lambda_2 + 6 \lambda_3 = 0
\end{cases}](upload/images/math/b/2/d/b2d17479786e3966d24d41be16eac8b2.png)
![\begin{cases}
4 \lambda_1 + 2 \lambda_2 + \lambda_3 = 0 \\
\lambda_1 + \lambda_2 + \lambda_3 = 0 & \to [\cdot(-4)] \to \\
4 \lambda_2 + 6 \lambda_3 = 0
\end{cases}
\begin{cases}
4 \lambda_1 + 2 \lambda_2 + \lambda_3 = 0 \\
\underline{-4 \lambda_1 -4 \lambda_2 - 4 \lambda_3 = 0} \\
-2 \lambda_2 - 3 \lambda_3 = 0
\end{cases}](upload/images/math/4/e/d/4eda88e75beabcdc1d239d830a18f5cc.png)
- λ1 = t
- λ2 = t( − 3)
- λ3 = 2t
Slutsats:  har ett linjärt beroende med
har ett linjärt beroende med  och
och  eftersom λ1, λ2 och λ3 inte är lika med 0.
eftersom λ1, λ2 och λ3 inte är lika med 0.
[edit] 2007-09-12
[edit] Kap 3
Förkottningar:
- R - reela tal
- O - origo
 - Normalvektorn
- Normalvektorn
[edit] 3.1 kordinatsystem
Om man fixerar en punkt i O(origo) så kan läget av en godtycklig punkt P beskrivas med Vektorn  . För en given bas
. För en given bas  ,
,
 finns då entydligt bestämda tal x,yz så att
finns då entydligt bestämda tal x,yz så att  .
.
Def! Vektorn  sägs vara ortsvektorn för punkten P. Talen x, y, z sägs vara kordinater för punkten P i kordinatsystemet
sägs vara ortsvektorn för punkten P. Talen x, y, z sägs vara kordinater för punkten P i kordinatsystemet  .
.
Obs1! Koordinatsystemet behöver inte vara rätvinklikt.
Obs2! Man använder baser , för att representera vektorer. Man använder kordinatsystemet  , för att beskriva läget hos punkterna:
, för att beskriva läget hos punkterna:
 Punkt
Punkt
 vektor
vektor
Obs3! Linjen genom O med riktningen kallas för x-axel punkten :(1,0,0) kallas enhetspunkt längs x-axeln.
Planet genom O(origo) som innehåller x och y-axlarna kallas för xy-planet och skrivs Z=0. p.s.s Planet genom O som inehåller x och z kallas för xz-planet osv. Planen kallas gemensamt för koordinatplan.
Lemma: Låt P1:(x1,y1,z1) och P2:(x2,y2 då gäller  .
.
EX: Ange kordinaterna för vektorena som går från P0:(1,3,4) till P:(2,0,5)
 .
.
 .
.
[edit] 3.2 Linjens Ekvation
En line är entydligt bestämd om man känner en punkt på linjen och vet att den är parallell med en vetkor  . En godtycklig punkt P i rummet ligger på linjen om
. En godtycklig punkt P i rummet ligger på linjen om  är parallell med
är parallell med  (linjen) där P0 ligger på linjen.
(linjen) där P0 ligger på linjen.  för något tal
för något tal 
Ex: I ett koordinatsystem i rummet finns punkten P0:(x0,y0,z0) och P:(x,y,z) och en vektor  .
.
 där
där
Detta kan skrivas som (x − x0,y − y0,z − z0) = (tλ,tβ,tγ).
x0,y0,z0 är en punkt på linjen.
tλ,tβ,tγ är linjens riktningsvektor.
EX: Ange en ekvation på paramerform för linjen genom punkterna (1,-1,4) och (2,3,5). Riktningsvektorn är ena punkten minus den andra
Ritningsvektorn 
EX: Vad kan man säga om linjen l som har parameterformen.
Den går genom punkten (3,-6,-5) och har riktningsvetorn  .
.
EX: en linje har parameterformen:
a) ange en punkt på linjen
- (-2,1,4)
b) ange en riktningsvektor för linjen

c) hur får man andra punkter på linjen?
- (1,-1,3)
d) finns det fler riktningsvektorer till linjen?
 , och dett finns oändligt antal av dom...
, och dett finns oändligt antal av dom...
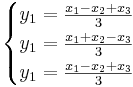
EX: Ange en linje som går genom punkten (1,3,1) och är parallell med linjen:
EX: Skär linjerna varandra?
Om De skär varandra så har de en punkt gemensamt.
VL: 2 + 1 / 3 = 7 / 3 HL:
VL:  HL: − 1 + 2 / 3 = − 3 / 3 + 2 / 3 = − 1 / 3
HL: − 1 + 2 / 3 = − 3 / 3 + 2 / 3 = − 1 / 3
Detta Stämmer EJ! Linjerna är inte parallella för att  dvs
dvs

Linjer i planet:
EX: Bestäm en ekvation för linjen som går genom punkten (2,3) och som har riktningen (-1,3).
På Parameterform:

3x + y − 9 = 0 är skriven på affin form!
I planet finns alltså två sätt att skriva linjens ekvation. Dels i parameterfrom och dels i affin form.
EX: Skriv linjen x − 2y + 5 = 0 i parameterform och ange dess riktningsvektor.
[edit] Sammanfattning om linjer
I rummet kan linjens ekvation skrivas på parameterform:  I planet kan lijens ekvation skrivas dels på paramterform och dels på affin form.
I planet kan lijens ekvation skrivas dels på paramterform och dels på affin form. 
Där  och ax + by + c = 0.
och ax + by + c = 0.
[edit] 3.3 Planets ekvation
Ett plan är entydigt bestämt om man känner en punkt P0 och två vektorer  och
och  i planet och som inte är parallella. En godtycklig punkt P i rummet ligger i planet π om och endast om är parallell med planet
i planet och som inte är parallella. En godtycklig punkt P i rummet ligger i planet π om och endast om är parallell med planet  för några tal t1 och t2.
för några tal t1 och t2.
Obs! Om man inför ett kordinatsystem i rummet så behöver inte O(origo) ligga i plannet.
P0:(x0,y0,z0) P:(x,y,z)


(x − x0,y − y0,z − z0) = t1(λ1,β1,γ1) + t2(λ2,β2,γ2)
x0,y0,z0 är en punkt i planet t1λ1,t1β1,t1γ1 är riktningsvektorn t2λ2,t2β2,t2γ2.
EX: Bestäm ekvationen för det plan som innehåller punkterna (5,1,1,),(4, − 1,2),(2,2, − 3).


På affin form blir det:
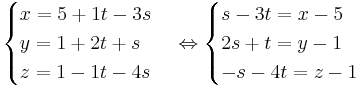
![\begin{cases}
s-3t = x - 5 & [\cdot(-2)] \\
2s + t = y - 1 \\
-7t = x + z -6
\end{cases}
\begin{cases}
-2s + 6t = 2x + 10 \\
\underline{2s + t = y -1} \\
7t = -2x + y + 9
\end{cases}
\Leftrightarrow
\begin{cases}
s - 3t = x -5 \\
7t = -2x + y + 9 \\
-7t = x + z -6
\end{cases}
\begin{align}
& 7t = -2x + y +9 \\
& \underline{-7t = x + z - 6} \\
& 0 = -x + y + z + 3
\end{align}](upload/images/math/2/8/7/287aa4103e73f8ba54a98c44c8c9b14e.png)
På affin form blir det då: x − y − z − 3 = 0.
[edit] Klassiskt exempel
EX: Bestäm ekvariton för planet som går genom (1,0,0) (0,1,0) (0,0,1) på affin form.


planets (normalvektorn) = (1,1,1)
Obs! x + y + z − 1 = 0 är parrallell med x + y + z + 3 = 0, dvs alla x + y + z + k = 0 är parrallell med c + y + z = 0.
[edit] Sats 2. Planets ekvation
Planets Ekvation kan skrivas del på parameterform:
dels på Affin form ax + by + cz + d = 0 där talen a,b,c inte alla är lika med noll.
Hur kommer man från affin form till parameterform?
EX: Skriv på parameterform ekvationen för planet π:x + 4y + 2z − 8 = 0
- tips: sätt y = s, z =t, och sätt in dessa i ekvationen för planet och lös ut f(x).
EX: Undersök om punkterna A:(1,0,0), B:(2,1,0) och C:(2,3,5) ligger i planet:
Med ovandnämnda metod så får man fram att:
- A ligger i planet
- B ligger i planet
- C ligger inte i planet
Om ett plan skär kordinataxlarna i punkten (a,0,0), (0,b,0) och (0,0,c) så kan dess ekvation skrivas med interceptformlen x / a + y / b + z / c = 1.
EX: Var skär planet 3x + 6y + 2z − 6 = 0 kordinataxlarna?
3x / 6 + 6y / 6 + 2z / 6 = 6 / 6 dvs x / 2 + y / 1 + z / 3 = 1
[edit] 2007-09-14
Ex1: Var skär planet 2x − 3y + 5z − 8 = 0 kordinataxlarna?
2x / 8 − 3y / 8 + 5z / 8 = 8 / 8
Planet skär x -axlen på y = 4
Planet skär y -axlen på y = − 8 / 3
Planet skär y -axlen på y = 8 / 5
Ex2: Bestäm skärningspunkten mellan planet π:2x − 3y + z + 5 = 0
Och linjen L:(x,y,z) = (2,3, − 2) + t(2, − 1, − 4)
beräkna linjens (x,y,z) kordinater först, dvs:
((3 + 2t),(5 − t),( − 2 − 4t))
Sätt in linjens kordinater (x,y,z) i planets ekvation för att see var och om det finns en skärningspunkt.
Beräkna linjens kordinater för detta t, dvs:
Svar: Linjen skär planet i punkten (7,3, − 10).
[edit] Geometrisk teori för linjära ekvationsystem
ax + by + cz + d = 0 är en ekvation för ett plan i rummet. Att lösa ett linjärt ekvationsystem innebär att man försöker finna gemensamma punkter för planen dvs. skärningspunkter.
Följande kan inträffa för planen!
- (i)de saknar gemensamma punkter
- (ii)de skär varandra i en punkt -entydig lösning
- (iii)de skär varandra utefter en linje -oändligt antal lösningar
- (iv)de är identiska
Har man endast två plan så kan inte (ii) inträffa.
Ex1: Bestäm skärningen mellan planet:
π1:x − y + 3z − 2 = 0 och π2:3x + y + z − 6 = 0
Detta gör efter en viss beräkning att:

Om två plan är parallella eller identiska så gäller:
Samtliga variablerna x,y,z försvinner om  .
.
Ex2: Avgör om vektorn (7,4,16) är parallell med planet π:4x + y − 2z + 1 = 0.
Ett plan parrallellt till π men som går genom origo kan beskrivas som π1:4x − y − 2z = 0.
Sätt in vektorn (7,4,16) i detta plan så ger detta:
Alltså vetkorn är parallell med planet!
[edit] Kap4. Skalärprodukt
4.1 Med den skalära produkten  av de två vektorerna och menas det reella talet:
av de två vektorerna och menas det reella talet:
![\overline{u} \cdot \overline{v} =
\begin{align}
|\overline{u}| \cdot |\overline{v}| \cdot \cos[\overline{u}, \overline{v}] \\
\mbox{0 om }\overline{u} \mbox{ eller }\overline{v} \mbox{ är = 0}
\end{align}](upload/images/math/9/8/9/9895d7121fc7f17651e8bce57c21dea0.png)
Ex1: Beräkna skalärprodukten för vektorerna och med  och
och  om vinkeln melan dem är:
om vinkeln melan dem är: 

Arbete = 
Def: Om  sägs och vara ortogonala(vinkelräta mot varandra) eftersom cos(π / 2) = 0
sägs och vara ortogonala(vinkelräta mot varandra) eftersom cos(π / 2) = 0
Antag att för varje vetkor definieras en vetkor  . Vektorn kallas
. Vektorn kallas  :s ortogonala projektion på .
:s ortogonala projektion på .
[edit] Projektionsformlen
Den ortogonala projektionen av på ges av formlen:
Sats2. Räknelagar för skalärprodukt.
- (i)

- (ii)

- (iii)

- (iv)

[edit] 4.2 Ortonomerad bas
För Koordinatuttrycket för skalärprdukt, låt  ,
, vara en bas i planet. om
vara en bas i planet. om  och
och  så gäller enligt räknelagarna att
så gäller enligt räknelagarna att 
Om och är ortogonala och har längden 1 dvs om  och
och  då blir skalärprodukten
då blir skalärprodukten  .
.
Om ,, är en bas i rummet och
är en bas i rummet och  och
och  då blir
då blir  under förutsättningen att ,, är ortonomerade om
under förutsättningen att ,, är ortonomerade om  .
.
 dvs pytagoras sats
dvs pytagoras sats
Ex1: om  så är
så är 
Def. Vektorena ,, i rummet sägs utgöra en ortornomerad bas om de har längden 1 och att de är parvis vinkelräta. I tentorna så gäller det nästan alltid att uppgifterna har en ortornomerad bas
Sats3 Om  och
och  med avseende på en ortonomerad bas så är
med avseende på en ortonomerad bas så är 
Ex2  och
och  i en ortonomerad bas.
i en ortonomerad bas.
- a) beräkna skalärprodukten
- a = vilket ger 9.
- a =
- b) beräkna vinkeln mellan och
- b =
![\overline{u} \cdot \overline{v} = |\overline{u}| \cdot |\overline{v}| \cdot \cos[\overline{u},\overline{v}]](upload/images/math/7/5/2/752e89dfa1bca69ee34e8d3525551f07.png) . 9 är samma sak som och
. 9 är samma sak som och  är roten ur total summan av varje kordinat uphöjt med 2, dvs
är roten ur total summan av varje kordinat uphöjt med 2, dvs  .
.
- b =
Detta ger att b = 76°
basbyte vid ortonomerad bas
EX3: Låt , vara en ortonomerad bas i planet, visa att även:
Svar: Eftersom det är en ortonomerad bas så gäller det att  . Med det så kan man beräkna.
. Med det så kan man beräkna.  . ............
. ............
4.3 Några geometriska Tillämpningar
Ex1: Två Vinkelräta komposanter varav den ena är parallell med vetkorn  .
.
Projection formlen: 
svar: (0,-1,1)
Avståndet mellan två punkter är absolut värdet av vektorn mellan punkterna. Absolut värdet av en vektorn kan beräknas med formlen  där
där 
Cirkelns ekvation i ett ekvationsystem:

Sfär i rummets ekvation i ett ekvationsystem:

[edit] Vinkelbestämning
Ex1: Bestäm vinkeln mellan linjerna:
Svar: två vektorer  och
och  . Skalärproduktformeln ger:
. Skalärproduktformeln ger:
![\overline{u} \cdot \overline{v} = |\overline{u} \cdot \overline{v} \cdot \cos[\overline{u}, \underline{v}]](upload/images/math/9/1/5/915fd7b5d66eff79bbd3ec7500f4c1ab.png)
![-4 = 9 \cos [\overline{u}, \overline{v}] = [\overline{u}, \overline{v}] = \arccos (-4/9) = 116^\circ](upload/images/math/8/9/9/89949813501229d754072976a8ff8af2.png)
[edit] Planets normalriktning
Låt π:(ax + by + cz + d = 0) vara ett plan i rummet med vektorn  är parallell med planet om d i planets ekvation kan vara noll. men dår är
är parallell med planet om d i planets ekvation kan vara noll. men dår är  och ortogonala. alltså skalärprodukten (a,b,c)(λβγ) = 0 om som är parrallell med planet är vinkelrät mot så måste vara normal till planet.
och ortogonala. alltså skalärprodukten (a,b,c)(λβγ) = 0 om som är parrallell med planet är vinkelrät mot så måste vara normal till planet.
Ex1: Planet 2x + 3y − 5z + 7 = 0 har normalvektorn  .
.
Sats: För plan i rummet resp. linjer i planet gäller ax + by + cz + d = 0 har normalen och linjen ax + by + c = 0 har normalen 
Ex2: Bestäm vinkeln mellan planen π1:x1 + x2 − 2x3 = 1 och π2:x1 − x3 = − 1.
Svar: Vinkeln mellan planen är samma som vinkeln mellan normal vektorena. dvs vinkeln mellan 
 .
. ![(1,1,-2)(1,0,-1) = \sqrt(6) \cdot \sqrt(2) \cdot \cos[\overline{n_1},\overline{n_2}] = \arccos[\overline{n_1}, \overline{n_2}] = sqrt(3)/2](upload/images/math/e/5/0/e50e41b24dec3cf4bca64d53040799a4.png)
Ex3: Låt π vara planet 2x − 4y + 2z = 0. Dela upp vektorn  i vinkelräta komposanter
i vinkelräta komposanter  och
och  så att är parrallell med planet och är vinkelrät mot planet.
så att är parrallell med planet och är vinkelrät mot planet.
svar: planets normal är  skriven som (1, − 2,1). säger vi är den vågräta vektorn och
skriven som (1, − 2,1). säger vi är den vågräta vektorn och  är den lodräta.
är den lodräta.


[edit] 2007-09-19
EX: Låt π vara planet 2x − 4y + 2z = 0. Dela up vektorn  i vinkelräta komposanter så att
i vinkelräta komposanter så att  och
och  .
.


(((2, − 1,2)(1, − 2,1)) / 6)(1,2,1) = 6 / 6(1,2,1) = (1,2,1)

EX1: Spegla punkten P(2,3,4) i planet π:(2x + y − 2z) = 0, ange koordinaterna för en speglade punkten.
- Tips Origo finns i punkten eftersom det enkelt kan representeras av planets ekvation.
EX2: Spegla punkten P(2,3,4) i planet π:(2x + y − 2z + 3) = 0, ange koordinaterna för en speglade punkten.
- Tips Nu kan vi inte använda oss av Origo.
- Tips Skapa en punkt genom att sätta x,y till lämpligt värde (vanlig vis 0 eller 1) och räkna ut vad y ska bli.
P:(2,3,4)
π:(2x + y + 2z + 3 = 0)

Plan: Beräkna u1. Sedan ta två negativa u1 och addera det med punkten vi vill spegla.
[edit] Avstånds formlen
Avståndet mellan punkter och plan/linje
π:ax + by + cz + d = 0
p0:(x0,y0,z0)
A:(p,q,r)


Gör sammtliga utryck för  i absolut form...
i absolut form...
 Detta är avstånds formlen!!!
Detta är avstånds formlen!!!
avståndet mellan punkten p0 och planet π är  .
.
EX: Ange avståndet från planet 3x - 4y + 12z = 13 till punkterna (0,0,0) och (2,1,3). Ligger punkterna på samma eller olika sidor om planet?
1. Punkten (0,0,0) i avståndsformlen:

2. Punkten (2,1,3) i avstånds formlen:

Eftersom innan för absolut belopet är talen posetivt för det ena punkten, och negativ för den andra så ligger dom på olika sidor om planet!
EX: Bestäm den kortaste avståndet från punkten (1,2,3) till den räta linjen:
A:(1, − 4,3) 

Avståndet mellan punkterna och linjen är 
[edit] Kap 5
[edit] 5.1 Orientering
Def1: antag att de tre vektorena  inte ligger i ett plan. Om den minsta vridning som överförs
inte ligger i ett plan. Om den minsta vridning som överförs  :s riktning i
:s riktning i  :s riktning ser ut att ske moturs från spetsen av
:s riktning ser ut att ske moturs från spetsen av  så sägs vara positivt orienterade.
så sägs vara positivt orienterade.
[edit] 5.2 Vektorproduct och skalär trippleprodukt
Def2: Låt  och vara två vektorer i rummet. Med vektorprodukt menas den vektor som har egenskapen:
och vara två vektorer i rummet. Med vektorprodukt menas den vektor som har egenskapen:
![|\overline{v} \times \overline{v}| = |\overline{u}| \cdot |\overline{v}| \sin[\overline{u},\overline{v}]](upload/images/math/e/3/a/e3a507a1e7013c472e674b517132df74.png) .
. är ortogonal mot både och .
är ortogonal mot både och .- De tre vektorena , och är positivt orienterade om
 eller
eller  så är
så är  = 0.
= 0.
Sats:  arean av den parallellogram som representeras av och .
arean av den parallellogram som representeras av och .
Def3: Med skalär trippelproduct menas  . Den ger Volumen av en låda med formlen:
. Den ger Volumen av en låda med formlen:
![|\overline{u} \times \overline{v}| \cdot |\overline{w}| \cdot \cos[(\overline{u} \times \overline{v}),\overline{w}] = |(\overline{u} \times \overline{v}) \cdot \overline{w}|](upload/images/math/a/7/9/a79887bc83574b5bf5a7e2df3d948d0b.png)
Detta gäller enbart om samtliga är posetivt orienterade eller samtliga är negativt orienterade.
[edit] 5.3 räknelagar för vektorprodukt
- (i)
 endast om vektorena är parallella.
endast om vektorena är parallella. - (ii)

- (iii)

- (iv)

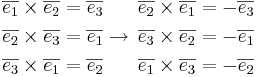
[edit] 5.4 Vektorprodukt i ortonomerade baser
antag att  är en pos.orienterad bas i rummet. Då gäller:
är en pos.orienterad bas i rummet. Då gäller:
NOTE 
EX1:  .
. 
Beräkna 
Alltså vektorn  .
.
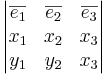
Sats5: Om och med avseende på en pos.orienterad bas så är  .
.

EX1: Beräkna när  och
och  .
.
svar:  .
.  .
.
π = − 2x − 4y + 4z + d = 0
[edit] 5.5 Några geometriska tillämpningar
EX1: Beräkna arean av triangelen med hörn i P0:(2,2,1),P1:(4,3,2),P2:(1,5,1).
 och
och  .
.
svar: 

Vanligt tenta uppgift: EX: Avståndet mellan två linjer
[edit] Kvadratiska Linjära ekvationsystem
sats3: För kvadratiska matriser A är följande vilkor ekvivalanta.
- A:s Kolonnvekktorer utgör en bas
- AX = 0 har bara den triviala lösningen X = 0
- AX=Y är lösbart för alla y
[edit] 7.5 Invers matris
Ekvationsystemet A: 
har lösningen 
Lösningen kan även skrivas som 
eller matrisform 
Invermatris skrivs som A − 1.
Alltså: AX = Y
A − 1AX = A − 1Y där A − 1A är I (Enhets matrisen).
Enhetsmatriser har utseendet
Enhetsmatrisen fungera som en etta vid multiplikation.
EX IA = A
Def: Den Kvadratiska matrisen A sägs vara inverterbar om det finns en matris A − 1 s"att A − 1A = I och A A − 1 = I.
Matrisen A − 1 kallas inversen till matrisen A.
EX: A^-1 =  är invers till A
är invers till A 

Sats4. Om A och B är inverterbara så är A − 1, At och AB inverterbara.
För inverserna gäller:
- (i) (A − 1) − 1 = A
- (ii) (AT) − 1 = (A − 1)T
- (iii) (AB) − 1 = B − 1A − 1 <-- Observera ordningen
Inversen kan beräknas:
EX: 
Där  är inversen till A.
är inversen till A.
Om man kan lösa ett ekvationsystem AX = Y för ett allmänt högerled Y så är A inverterbart och gäller A = A − 1Y
Där ett allmänt högreled är: 
A = 
är inverterbar. Bestäm isåfall inversen:

Om (x1,x2,x3) går att lösa ut ur ekvationsystemet så finns det en invers.
Svar: 
[edit] 7.6 Matriser och basbyten
Sats 6. Låt  och
och  vara två baser i Rn.
vara två baser i Rn.
Låt S vara matrisen som har kolonnvektorena  . Antag att en vektor har koordinatfranställningen
. Antag att en vektor har koordinatfranställningen  . Då är X = SX' där X =
. Då är X = SX' där X = 
Matrisen S kallas för basbytesmatris!
OBS1 Basbytematriser är alltid inverterbara...
OBS2 Man är oftast intresserad av x' (man vet oftast redan vad x är).
S − 1X = S − 1SX1 Där S − 1S = I
S1X = X1
X1 = S − 1X
EX: 
Vilka koordinater har vektorn  i basen
i basen  ?
?

Def: A sägs vara en ortogonal matris om dess kolonnvektorer utgör en ortonomerad bas.
EX: Visa att matrisen A är ortogonal.
hint: ortogonal betyder att vektorena har längden 1 och är vinkelräta mot varandra.


EX: Bestäm talen a,b,c så att matrisen  blir ortogonal.
blir ortogonal.
hint Varje vektor ska vara vinkel rät med varandra dvs = med 0
Men som eftersom varje vektors längd är 7 så måste vi dividera med 7 på hela matrisen.
är därav ortogonal!
Sats7: Följande villkor är ekvivalanta:
- (i) Matrisen A är ortogonal
- (ii) Kolonvektorena är en ortonomerad bas
- (iii) Radvektorena är en ortonomerad bas
- (iv)

- (v) AAT = I
- (vi) A − 1 = AT
[edit] Kap 8 linjära avbildningar
[edit] Funktionsbegreppet
Funktioner från R till R.
- f(x) = x2 -inte en linjär ekvation
- f(x) = x -En linjärfunktion
- f(x) = ax -En linjärfunktion
Linjära avbildningar handlar om motsvarigheter med flera variabler
EX:
 Vilket är en funktion från R2 till R2
Vilket är en funktion från R2 till R2
F kan skrivas på matrisform.
y = AX
att  för linjära avbildningar gäller även att
för linjära avbildningar gäller även att 
EX: Betrakta den ortogonala Projecktionen på 4X1 − 3X2 = 0
- a) Var Projiceras (1,0) resp (0,1)
Skriv linjen på parameterform.
(L:(0,0) + t(3,4))


[edit] Matrissambanden
- b) Bestäm Matrissambandet y = A X
- c)



EX: Låt L vara linjen som går genom punkten O och har riktningsvektorn  . Låt P vara en godtycklig punkt i rummet och låt Q vara den ortogonala projektionen av P på L.
. Låt P vara en godtycklig punkt i rummet och låt Q vara den ortogonala projektionen av P på L.
a) Sätt  ,
,  härled en formel som beskriver avbildningen
härled en formel som beskriver avbildningen 
b) Inför ett ortonomerat koordinatsystem i rummet med origo i punkten O. Bestäm koordinatsambandet mellan  och
och  om .
om .

alternativ sätt: Ta fram avbildningsmatrisen genom att kontrollera hur enhetsvektorena avbildas.
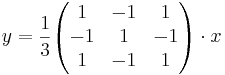
EX: Låt (y1,y2,y3) vara spegelbilden av (x1,x2,x3) vid spegling i planet 2x1 + x2 − 2x3 = 0. Ange ett matrissamband mellan (y1,y2,y3) och x1,x2,x3).
- P:(x1,x2,x3)
- Q:(y1,y2,y3)


 - Eftersom den ska till den andra sidan av speglingen, kan vi multiplicera med 2 på 1/9.
- Eftersom den ska till den andra sidan av speglingen, kan vi multiplicera med 2 på 1/9.

Alltså: 
Alternativ:
 avbildas på
avbildas på 





Sats 1: Följande påstående är ekvivalenta:
- (i)
 där F är en linjär avbildning
där F är en linjär avbildning - (ii) y = ax där A är en rektangulär matris
- (iii) A:s kolonner är bilderna av basvektorena
- d.v.s
- d.v.s
Def: Matrisen A i satsen kallas Avbildningsmatrisen för F där F är en funktion från N till M.
EX: R2 till R3, vanligen R2 till R2 eller R3 till R3. (plannet till plannet, rummet till rummet, planet till planet...)
OBS! Satsen säger att det räker att veta hur F avbildar enhetsvektorena.
OBS! Definitioner av linjära avbildning bygger på funktioner av vektorer när det gäller avbildning av punkter "går man över" och räknar med ortsvektorer.
EX: Projicera rummets punkter i planet π:x1 − 2x2 + 2x3 = 0. Alltså bestäm en matris för skuggor om ljuset kommer från solen i riktningen  . skugga punkten P : (7,8,2).
. skugga punkten P : (7,8,2).
y = Ax
[edit] Hur avbildas en enhetsvektorena?



Alltså: x1 − 2x2 + 2x3 = 0
- 1 + 3t − 2(t) + 2( − t) = 0
- 1 − t = 0
- t = 1
avbildas på (1 + 3,1, − 1) = (4,1, − 1)
- t = 1
avbildas på ( − 6, − 1,2)
- t = − 2
avbildas på (6,2, − 1)
- t = 2
EX: Spegla punkten P : (1,1,1,) i planet π:3x + 4y − 2z = 0
(1,1,1,) + t(3,4, − 2) = (1 + 3t,1 + 4t,1 − 2t)
3(1 + 3t) + 4(1 + 4t) − 2(1 − 2t) = 0



[edit] 2007-10-05
[edit] Avbildnings vektorer
[edit] Exempel på att skapa en avbildnings vektor
EX Utgå från en känd vektor  I rummet. Betrakta den linjära avbildningen:
I rummet. Betrakta den linjära avbildningen:

Ange ett matrissamband för avbildningen. Alltså:

TipsKontrollea vad som händer med enhetsvektorena vid avbildningen. 


[edit] Svar
[edit] Matriser för speciella avbildningar
Sats: Den linjära avbildningen ortogonal projektion på vektorn har avbildningsmatrisen:
där N är kolonnmatrisen som motsvarar .
EX: om N = (1,-1,1)
Hint: matris multiplikation

[edit] = Matrissamband
EX: Bestäm ett matrissamband mellan (y1,y2) och (x1,x2) om (x1,x2) övergår i (y1,y2) efter vridning  i positivt led.
i positivt led.

[edit] Isometrisk avbildning
Definition: En linjär avbildning sägs vara isometrisk om  för alla
för alla  .
.
Sats: En linjär avbildning är isometrisk om och endast om dess avbildningsmatris är ortogonal.
Värdemängd: Är mängden av alla  som funktionen kan generera.
som funktionen kan generera.
- Vid projektion på en linje är värdemängden hela linjen.
- Vid spegling i plan är värdemängden hela rummet.
- Vid Projektion i ett plan är värdemängden hela planet.
[edit] Sammansättning av två funktioner
Vanlig sista tenta uppgift
Sats: Om två avbildningar  och
och  är linjära så är även
är linjära så är även  linjära. Om F har avbildningsmatrisen A och G har avbildningsmatrisen B så gäller
linjära. Om F har avbildningsmatrisen A och G har avbildningsmatrisen B så gäller 
betyder 
Tips Dens avbildningsmatris som utförs först, ska stå sist i
EX: Bestäm matrisen för den avbildning som erhålls genom att man roterar planets punkter med vinkeln  runt origo och därefter speglar punkterna i x-axeln.
runt origo och därefter speglar punkterna i x-axeln.
- Funktionen G rotera med matrisen B.
- Funktionen F speglar med matrisen A.
Rotation 

[edit] EX
Ett rörsystem med tillflöde x1,x2 och uttflöde (y1,y2,y3).
Utflödet är alltså en funktion av tillflöde. Alltså en funktion från 
y1 = a11x1 + a12x2 y2 = a21x1 + a22x2 y3 = a31x1 + a32x2
Vid mätningar erhölls följande utflöden:
- Då x1 = 1 och x2 = 0:
- Då x1 = 0 och x2 = 1:






Hur stor blir utflödet om x1 = 3 och x2 = 4?
[edit] Svar:
Y = AX där Y =  och X =
och X = 

[edit] Gammla tenta uppgifter
[edit] Lös ekv.
ABX + B = AB där  och
och 
- ABX + B = AB
- (AB)X = AB − B

- I = (AB) − 1(AB)


Inversen blir: 

[edit] Betrakta basbytet:
Ett plan har ekvationen x' + 2y' + 3z' = 0 i basen  .
.
Bestäm planets ekvation i basen .
X = SX'
[edit] SVAR
11x − 2y − z = 0
[edit] Muterad variant
Vi vet att svaret är 11x − 2y − z = 0
S − 1X = S − 1SX'
S − 1S = I
s − 1X = X'
X' = S − 1X

3x + 6y + 9z = 0
x + 2y + 3z = 0
[edit] 2007-10-10
[edit] Kap 9. Determinanter
För kvadratiska matriser (A) inför man ett tal med determinanten A (det A).
EX 1:

EX 2:

[edit] 9.1
Parallellepiped = En "låda" uppspänd med rums vektorena.
Volym av en parallellepiped med tecken 
Volymsatsen. Låt  vara matrisen A:s kolonnvektorer med avseende på basen
vara matrisen A:s kolonnvektorer med avseende på basen  dvs:
dvs:



Då gäller  .
.  kan betraktas som en volymsenhet.
kan betraktas som en volymsenhet.
Följdsats: Antag att A:s kolonnvektorer är då gäller det  är linjärt oberoende och det
är linjärt oberoende och det  är inverterbar.
är inverterbar.
EX 1: Vektorena utgör en bas för rummets vektorer, med egenskapen 
Bestäm volymen av den parallellepiped som spänns up av  och
och 

- svaret är att volymen är 46 v.e
EX 2:
En parallellepiped har ett hörn i origo och de tre närligande hörnen i punkterna (3,0,-3), (6, 3, z) och (3,3,6). bestäm z så att parallellepiped volymen blir 27 volymenheter.

svar: − 9z + 27 = 27 och − 9z + 27 = − 27
EX 3:
Bestäm arean av en triangel med hörnen i (-1,2), (2,1) och (3,3).


Triangelarean är  a.e
a.e
EX 4:
Beräkna volymen av en tetraceder med hörn i punkterna P0(0,0,0),P1(1,0, − 1),P2(2,1,0) och P3(1,1,2)
Volymen blir  V.e
V.e
Sats 2. För varje kvadratisk (A) Matris råder sambandet det A = det AT
där A1,A2,A3 är vektorena
Sats3. För determinanter gäller följande räknerelagar
- a) det (A'1 + A''1,A2,A3) = det(A'1,A2,A3) + det(A''1,A2,A3)
- b) det

- c) om två kolonner byter plats så ändras determinanten tecken
- d) om två kolonner är lika så är determinanten noll.
- e) adderar man en mulltipel av en kolonn till en annan kolonn så ändras ej determinanten.
EX: det 
Om A1 = A'1 + A''2
a)
det A = 
b)
λ = 3
 är samma sak som
är samma sak som 
c)

d)
e)
EX:
Beräkna följande determinanter
- a)
- b)
EX: lös ekvationen 
svar: x(x − 1)2 = 0,X = 1
Utveckling av determinant efter rad och koloun
EX: Beräkna
det 
det 

Beräkna determenanten A genom att utveckla efter kolonn 2.

vektorprodukt 

[edit] 9.2
Sats4. Om A och B är kvadratiska matriser av samma typ så är det AB = det A  det B
det B
Sats5.
- (i) Om A 'r inverterbar så är det
 och det
och det 
- (ii) Om A är ortogonal så är det A = 1 eller -1.
[edit] Adjunkten
Med hjälp av underdeterminanter kan man bilda en ny matris.
Definition 3. Med adjunkten till en 3x3 matris menars matrisen:
Adjunkten A = 
note Transponering...
För en 2x2 matris gäller det att adj 
Sats: För adjunkmatrisen gäller A Adj A = Adj A A = det A I Om determinanten A  0 så är A inverterbar med inversen
0 så är A inverterbar med inversen 
EX: Bestäm innversen om den existera till 
det 
Eftersom -1 är inte noll, så har matrisen A en invers.

EX: Beräkna A − 1 för 

det
EX: Beräkna inversen till  Om den existerar.
Om den existerar.
Det 

EX: Beräkna inversen till 
Det 
[edit] 2007-10-12
[edit] Sats 8. Crames regel
Antag att A i AX = Y är av typ 3x3 med det. 0 då gäller att för varje Y har ekvationsystemet den entydiga lösningen
Motsvarande gäller om A är kvadratiskt i metris form.
EX: Lös ekvationsystemet


alt: 
[edit] Viktigt: 9.6 Huvudsatsen
Sats 9. För kvadratiska matriser A är följande villkor ekvivalenta:
- a) A:s kolonnvektorer är en bas
- b) A:s radvektorer är en bas
- c) Ekvationsystemet A X = 0 har bara triviala lösningen X = 0
- d) Ekvationsystemet A X = Y är lösbart för alla Y
- e) A är inverterbar
- f) Linjära avbildningar med avbildningsmatrisen A är bijektiva
- g) determinanten A 0
Sats 10. För kvadratiska linjära ekvationsystem A X = Y gäller
- Homogena system
- Om det A = 0 då finns det inga triviala lösningar
- Om det A 0 då finns det bara triviala lösningar
- Inhomogena system
- Om det A = 0 då finns det ingen lösning eller oändligt många
- Om det A 0 då finns det bara entydiga lösningar
Note: homogena system är = 0
[edit] Exempel 1.18: Undersök det inhomogena systemet
Har systemet mer än en lösning för något värde på a?


det A = 0 när a = 3 och a = 1 och då har ekvationsysemet inget lösning eller oändligt många lösningar. Om det 0 när a 3 och a 1 då finns entydig lösning.
[edit] Svar:
a = 3 ger: 
...
z = t
Alltså om a = 3 så finns det oändlig antal lösningar!
a = 1 ger: 

Om a = 1 så saknas det lösningar
[edit] Exempel 1.17: Lös ekvationsystemet
Lös för varje värde på a ekvationsystemet:
a3(a2 − 1) = 0

[edit] Svar:
a = 0 ger 
om a = 0 så finns det oändligt antal lösningar.
a = -1 ger 
z = t
om a = -1 så finns det oändligt antal lösningar.
a = 1 ger 
om a = 1 så saknas det lösning.
för a 0, a  innebär att det finns entydiga lösningar.
innebär att det finns entydiga lösningar.
[edit] sats 11. Volymen efter avbildning
Låt F vara en linjär avbildning från rummet till rummet och låt A ara dess avbildningsmatris i någon bas. För godtyckliga vektorer  gäller:
gäller:

där V_0 är volymen före avbildningen och V_1 är volymen efter avbildning.
Motsvarande gäller för avbildningar från planet till planet.
EX: 5.8 En triangel har hörn i punkterna (1,2,1), (0,4,-1) och (2,0,2).
- a) bestäm triangelns area
- b) vilken area har triangelns ortogonala projection i xy-planet?



Triangelns area är  a.e.
a.e.
Avbildningsmatris 
Skalfaktorn = det A. det A = 0.
Ny area 
[edit] 9.8 Determinanter av högre ordning
Sats 12. motsvarigheten till Satserna 1-11 gäller även allmäna matriser.
För determinanter av större ordning underlättar det om man utvecklar determinantenen efter rad eller kolonn.
EX:

EX: Beräkna ekvationen för det plan som innehåller punkterna (1,2,3), (1,1,1) och (2,0,1).

Alternativ metod 1:
Alternativ metod 2:
lägg till punkten P:(x,y,z)
vektorn blir då:

det A = 
[edit] Tenta liknade exempel (enkel)
Finns det något värde på konstanten a som gör att ekvationsystemet saknar lösning?

a = -1
a = -2
[edit] Svar
Om a = -1 så:
Om a = -1 så saknas det lösning
Om a = -2 så:

Alltså om a = -2 så finns det oändligt antal lösningar
[edit] 2. lös matrisekvationen


ACC − 1 = B − 1DC − 1

adj 

[edit] 3. Linjer som skär
Låt L1 vara linen genom punkterna (-2,1,-3) och (-2,3,-2)
l2 är skärningen mellan planen x + 2y + z - y = 0 och 2x + 3y -z -12 = 0. visa att linjera skär varandra och beräkan vinkel mellan dom.
![\begin{cases}
x + 2y + z = 7 \cdot [-2]\\
2x + 3y -z = 12
\end{cases}
\to
\begin{align}
-2x - 4y - 2z = -14 \\
\underline{2x + 3y - z = 12} \\
-y - 3z = -2
\end{align}](upload/images/math/3/2/2/322950e09779545b3fbbfb397e49542e.png)

l1 har riktningsvektorn 



kontrollera i ekv.

5 = 5
Alltså linjerna skär varandra i punkten 
![\overline{r_1} \cdot \overline{r_2} = |\overline{r_1}| \cdot |\overline{r_2}| \cdot \cos [\overline{r_1}, \overline{r_2}]](upload/images/math/b/1/2/b12bfabf7d125bfefaf57b5815164465.png)



![(0,2,1)(5,-3,1) = \sqrt{5} \cdot \sqrt{35} \cdot \cos [\overline{r_1}, \overline{r_2}]](upload/images/math/8/e/6/8e603dad8c44fbd69ac3cb4b878773c2.png)
![\cos [\overline{r_1}, \overline{r_2}] = \frac{-5}{\sqrt{5} \sqrt{35}}](upload/images/math/f/a/d/fad0ea66117208a3f5f245dd51ad89ad.png)
![[\overline{r_1}, \overline{r_2}] = \arccos \frac{-5}{\sqrt{5} \sqrt{35}}](upload/images/math/4/c/5/4c5db6e533bf7029706b4abee2e8781d.png)
[edit] 2007-10-19
[edit] Kap 10. Egenvärdeb och egenvektorer
[edit] 10.1 Vad innebär avbildningsmatrisen?
Denna avbildningsmatris innebär att rummets samtliga punkter projiceras i ett plan tex xy-planet
[edit] 10.2 Definitioner
Def: Låt F vara en linjär avbildning. Om skalären λ och vektorn  uppfyller vilkoret
uppfyller vilkoret  med
med  sägs är en egenvektor och λ är egenvärde till funktionen F.
sägs är en egenvektor och λ är egenvärde till funktionen F.
Def: Låt A vara en kvadratisk matris. Om skalären λ och kolonnmatrisen X uppfyller AX = λX där  sägs X vara egenvektor och λ egenvärde till A.
sägs X vara egenvektor och λ egenvärde till A.
Bestäm egenvärden och egenvektorer till matrisen 
AX = λX
AX − λX = 0
(A − λ)X = 0
Eftersom lambda är ett tal och A en matris, så kan man multiplicera med enhetsmatrisen.



0 = (λ − 5)(λ + 2) − ( − 12)
λ2 − 3λ − 10 + 12 = 0
λ2 − 3λ + 2 = 0

λ1 = 1
λ2 = 2
För λ = 1 ger:
x1 = − 3t
x2 = 2t
Egenvärdet λ = 1 har egenvektorn 
För λ = 2 ger:
x1 = − 2t
x2 = t
Egenvärdet λ = 2 har egenvektorn 
[edit] 2007-10-24
[edit] Egenvärden
[edit] EX: Bestäm egenvärden och egenvektorer
det(λI − A)

(λ − 2)(λ + 1)(λ − 1) = 0

Beräkna radvis dom 3 nya ekvationerna och sätt indom i ett ekvationsystem

[edit] Diagnoalisering
Def: Den linjära avbildningen F sägs vara diagonaliserbar om det finns en bas i vilken avbildningsmatrisen för F är en diagonalmatris.
Diagonalmatrisen 
Def: Matrisen A sägs vara diagonalserbar om det finns en inverterbar matris S och en diagonalmatris D så att S − 1AS = D
Sats: En n x n matris är diagonaliserbar om och endast om det finns n stycken linj. Oberoende egenvektorer till A i formeln S − 1AS = D är kolonnerna i S egenvektorer till A och diagonalelementen i D är egenvärderna.
Metod för diagonalisering:
- (i) Bestäm egenvärden till A
- (i) Bestäm egenvektorer till A
- (i) Bilda S av egenvektorena
- (i) Bilda D av egenvärdena
[edit] EX: Diagonalisera matrisen
det(λI − A) = 0


λ = 0 ger 

λ = 1 ger 
λ = − 1 ger 
[edit] EX: Beräkna=
A5 om 

det(λI − A) = 0
(λ − 9)(λ − 5) − 5 = 0
λ2 − 5λ − 9λ + 45 − 5

Alltså 
λ = 4 ger 
λ = 10 ger