MA1106/Exams
From FUKTwiki
Exam solutions made as student notes during lectures and exercises.
[edit] Övnings tenta 2006-01-04
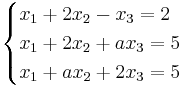
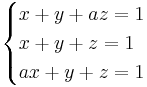
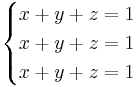
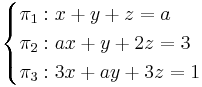
[edit] Uppgift 1. För vilka värden på a
För vilka värden på a har ekvationsystemet en entydig lösning, oändligt antal lösningar och när saknas det lösning?

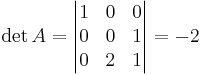
a2 − a − 2 = 0
a1 = 2
a2
[edit] a = 2 ger

ekvation 1 och 2 ger : 0x1 + 0x2 + 3x3 = 3
x3 = 1
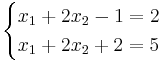
x2 = t
alltså oändligt antal lösningar
[edit] a = -1 ger

Ekvation 1 och 2 get : 0 = 3
alltså så saknas det lösning
[edit] Svar:
Om a = 2 så har vi oändligt antal lösningar.
Om a = -1 saknar vi lösning
Om  och
och  så finns det entydiga lösningar
så finns det entydiga lösningar
[edit] Uppgift 2 a). Lös matrisekvationen
AXB = C
A − 1AXBB − 1 = A − 1CB − 1




[edit] Svar:
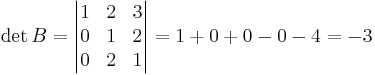
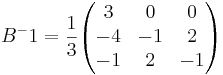
[edit] Uppgift 2 a). För vilka r är matrisen A inverterbar
Antag att 
För vilka är matrisen A inverterbar
När detA är skild från noll.

r(r − 1) = 0
r1 = 0
r2 = 1
[edit] Svar:
Om  och
och  är matrisen inverterbar.
är matrisen inverterbar.
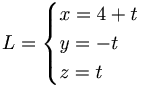
[edit] Uppgift 3. Beräkna kortaste avståndet
Beräkna det kortaste avståndet mellan linjerna
l2:(x,y,z) = (1,2,0) + t(4, − 3,1)
Ta fram en vektor som är vinkelrät mot båda linjerna.


alltså 
P1:(1,2,3)
P2:(1,2,0)


[edit] Svar:
Alltså  l.e.
l.e.
[edit] Uppgift 4 a). Visa att vektorena är linjärt oberoende
Antag att 
Visa att vektorena  utgör en bas i R3 dvs att vektorena är linjärt oberoende.
utgör en bas i R3 dvs att vektorena är linjärt oberoende.
om  så är dom linjärt oberoende
så är dom linjärt oberoende
[edit] Svar:
alltså är linjärt oberoende och utgör en bas i R3
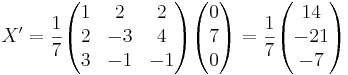
[edit] Uppgift 4 b). Bestäm koordinaterna med avseende på basen
Antag att
Bestäm koordinaterna för vektorn (0,3,0) med avseende på basen
u = (0,3,0)
Basbytematris 
X = S X'
X' = S − 1 X

[edit] Svar:
vektorn  får koordinaterna (6, − 9, − 3) i den nya basen
får koordinaterna (6, − 9, − 3) i den nya basen
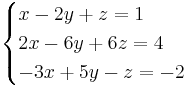
[edit] Uppgift 5. Beräkna avståndet mellan linje och punkt
Linjen l ges av skärningen mellan planen x - 2y + 3z = -1 och x + y - 6z = 0. beräkna det kortaste avståndet mellan punkten P (1,-1,0) och linjen l.
hint : Beräkna linjen. hitta på en godtycklig punkt på linjen, beräkna vektorn. Projecera den nya vektorn på linjen. Minska den nya projecerade linjen med den beräknade vetkorn.
![\begin{cases}
x - 2y + 3z = 1 [-1]\\
x + y - 6z = 0
\end{cases}
\to
\begin{align}
-x + 2y - 3z = 1 \\
\underline{x + y - 6z = 0}
3y - 9z = 1
\end{align}](upload/images/math/a/2/9/a2947bc9756c717374cd779d738a0db6.png)

[edit] Svar:

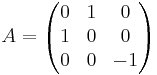
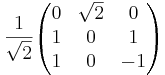
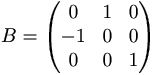
[edit] Uppgift 6. Ange avbildningsmatrisen
Ange avbildningsmatrisen för den linjära avbildning som består i att man först rotera rummets vektorer vinkeln  runt y-axeln (moturs i y-axelns positiva riktning) och därefter speglar rummets vektorer i linjen (x,y,z) = t(1,1,0)
runt y-axeln (moturs i y-axelns positiva riktning) och därefter speglar rummets vektorer i linjen (x,y,z) = t(1,1,0)

G är det man gör först med avbildningsmatrise B.
F har avbildningsmatrisen A.
Börjar med att kontrollera vad sm händer med enhetsvektorena
Rotation
 får koordinaterna
får koordinaterna 
 får koordinaterna (0,1,0)
får koordinaterna (0,1,0)
 får koordinaterna
får koordinaterna 
Avbildningsmatrisen 
Spegling
får koordinaterna (0,1,0)
 får koordinaterna (1,0,0)
får koordinaterna (1,0,0)
 får koordinaterna (0,0,-1)
får koordinaterna (0,0,-1)

[edit] Svar:
[edit] Övningstenta 2007-06-04
[edit] Uppgift 1. Bestäm lösningen till ekvationssystemet
Bestäm hur lösningen till ekvationssystemet beror på värdet på a.
Beräkna när determinanten Är skild från 0.

a2 − 2a + 1 = 0

a = 1 ger:
oändligt antal lösningar.
 ger:
ger:
(a − 1)z = 0
slutsats: z måste vara 0 om .
slutsats: x måste vara 0 om och då måste y vara lika med 1.
[edit] Svar:
Alltså oändligt antal många lösningar om a = 1. Om a  1 så finns det entydiga lösningar.
1 så finns det entydiga lösningar.
för dom entydiga lösningarna måste:

[edit] Uppgift 2 a): Bestäm arean av triangeln
Bestäm arean av en triangel med hörn i punkterna (1,2,3), (3,1,2) och (-4,0,4)


Arean av triangeln är 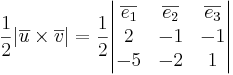

 a.e
a.e
[edit] Svar:

[edit] Uppgift 2 b): Beräkna volymen
Beräkna volymen av en parallellepiped som späns upp av vektorena 
Volymen av en parallellepiped är lika med determinantens belopp.
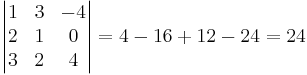
alltså volymen är 24 v.e
[edit] Lös matrisekvationen
Lös matrisekvationen A X B = C
A − 1AXBB − 1 = A − 1CB − 1
X = A − 1CB − 1



[edit] Uppgift 4 a): Linjärt oberoende?
Visa att vektorena ugör en bas i R3 dvs, att vektorena är linjärt oberoende.
Om determinaten är skild från noll så är dom linjärt oberoende.
[edit] Svar:
Determinaten är 7 dvs inte noll, så dom är linjärt oberoende och därmed utgör en bas i R3.
[edit] Uppgift 4 b): Bestäm koordinaterna för vektorn
Bestäm koordinaterna för vektorn (0,7,0) med avseende på basen
detS = 7
[edit] Svar:
Den nya vektorn får koordinaterna (2,-3,-1)
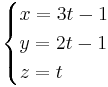
[edit] Uppgift 5: Koordinaterna för linjen
Ange ekvationen för den räta linjen, som går genom punkten P (4,0,0) och under rät vinkel skär linjen 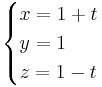
Ta den godtyckliga punkten (1,1,1) från linjen och beräkan vektorn mellan den nya punkten och P.



L:(4,0,0) + t(1, − 1,1)
[edit] Svar:
Den nya linjen blir (4,0,0) + t(1,-1,1)
[edit] Uppgift 6: Spegling och vridning
Låt F vara den linjära avbildning som speglar rummets vektorer i planet x1 − 2x2 + 2x3 = 0, och låt G vara den linjära avbildning som vridet rummets vektorer med vinkeln  i positiv riktning kring x3 - axlen (z - axlen).
i positiv riktning kring x3 - axlen (z - axlen).
[edit] A) bestäm matrisen till F



Bestäm A. 
(1,0,0) + t(1, − 2,2) = (1 + t, − 2t,2t), slå ihop det med planets ekvation
1 + t − 2( − 2t) + 2(2t) = 1 + 9t


[edit] b)
[edit] C)

[edit] Övnings tenta 2002-03-12
[edit] Uppgift 1 Lös ekvationsystemet
[edit] Uppgift 2 bestäm matrisen X
Bestäm matrisen X i ekvationen AX + BT = C
AX + BT = C
AX = C − BT
A − 1AX = A − 1(C − BT)
X = A − 1(C − BT)

Kontroll:

då har vi bevisat att den är rätt.
note BT är kolummer skrivna som rader

[edit] Uppgift 3: En triangel
En triangel har hörn i punkterna (1,2,3), (1,1,1) och (2,0,1)
[edit] a) Bestäm arean


Triangelns area är 

 a.e
a.e
[edit] b) planets ekvation på affin form
Planets normal (-2,-2,1) eller (2,2,-1).
Planets ekvation 2x + 2y -z +d = 0
vi sätter in en av punkterna:
2x + 2y -z + d = 0

d = -3
2x + 2y + z -3 = 0
[edit] Uppgift 4: spegelbilder
Punkterna (1,1,1) och (3,2,2) är varandras spegelbilder i ett visst plan. Bestäm ekvationen för detta plan.


planets ekvation: 2x + y + z + d = 0
d = -7
[edit] Svar:
2x + y + z -7 = 0
[edit] Uppgift 5: HON-system
 är ett HON-system. I detta har punkten P koordinaterna (2,5,8). Ett nytt HON-system
är ett HON-system. I detta har punkten P koordinaterna (2,5,8). Ett nytt HON-system  införes så att e'1 blir parallell med planet 3x + 2y − z + 1 = 0 och så att e'2 blir parallell med vektorn (1,1,1). Ange koordinaterna för punkten P i det nya systemet. Flera fall är möjliga. Välj ett!
införes så att e'1 blir parallell med planet 3x + 2y − z + 1 = 0 och så att e'2 blir parallell med vektorn (1,1,1). Ange koordinaterna för punkten P i det nya systemet. Flera fall är möjliga. Välj ett!


note Vi struntar i bråktalet, och förkortar.


(Ops... Ovan blev fel...)
X = SX'
X' = S'X


[edit] Uppgift 6: 
F och G är två linjära avbildningar enl. följande:
- F roterar rummets vektorer vinkeln moturs kring x-axlen, om man tittar i negativa x-axlen riktning.
- G roterar rummets vektorer vinkel moturs kring y-axlen, om man tittar i negativa y-axlens riktning.
Bestäm matrisen för den sammansatta avbildningen
avbildas på (1,0,0)
avbildas på 
avbildas på 
avbildas på (0,0,1)
avbildas på (0,1,0)
avbildas på (-1,0,0)

[edit] Övnings tenta 2002-06-07
[edit] Uppgift 1: Vilka värden på a?
För vilka värden på a har de tre planen en och endast en gemensam punkt?

detA = 0
a2 − 5a + 6 = 0

a1 = 2
a2 = 3
[edit] Svar:
Enligt huvudsatsen så har ekvationsystemet ett entydig lösning när och 
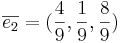
[edit] Uppgift 5
Kolla att  är oberoende.
är oberoende.
Om determinanten är  så är vektorena linjärt oberoende.
så är vektorena linjärt oberoende.
[edit] b) bestäm koordinaterna
för 
X' = S − 1X

(om man vill kan man kontrolera att 
[edit] Uppgift 6
Speglar rummets vektorer i planet 2x + 3y + z = 0
note Undersök vad som händer med basvektorena
(1,0,0) + t(2,3,1) = (1 + 2t, 3t,t)
2(1+2t) + 3(2t) + 1(t) = 0

Spegelpunkten Q är två t.

calcylations here

calcylations here

Y = A X
Vill vill ha ut a så vi räkna ut X'.


[edit] Övriga övnings-tentor
note: Tenta 2002-06-07 saknas online
